
|
Henrik Schäfer, Frank Lenzen, Christoph S.Garbe
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||

| 
| 
| 
|
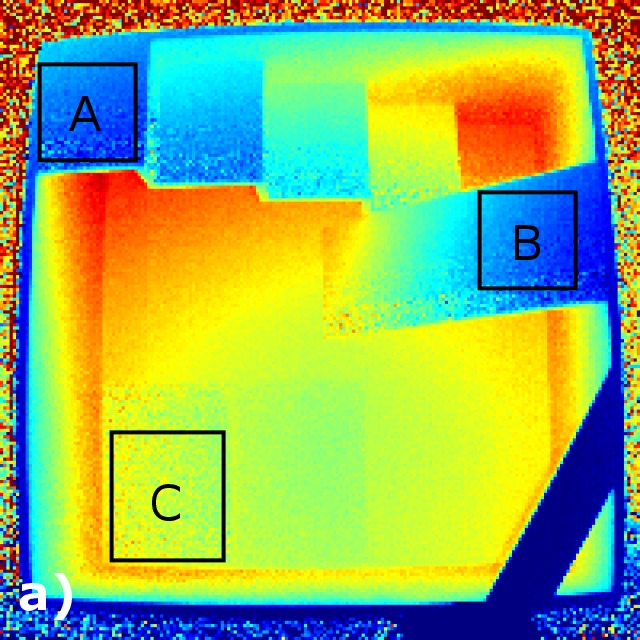
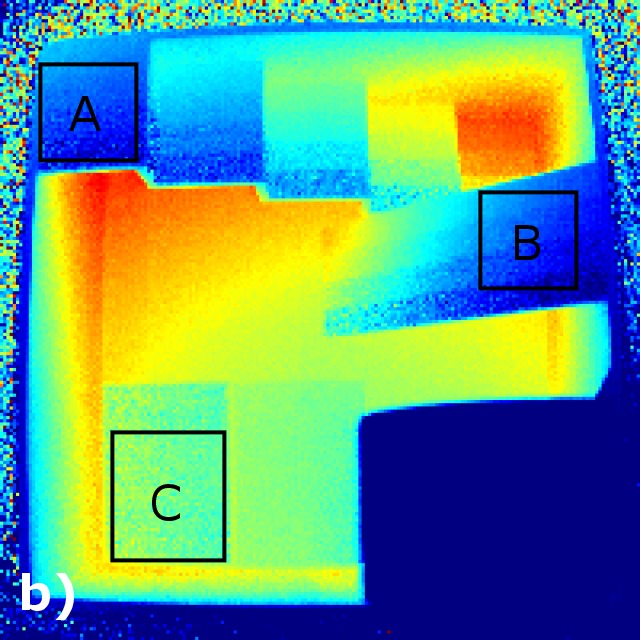
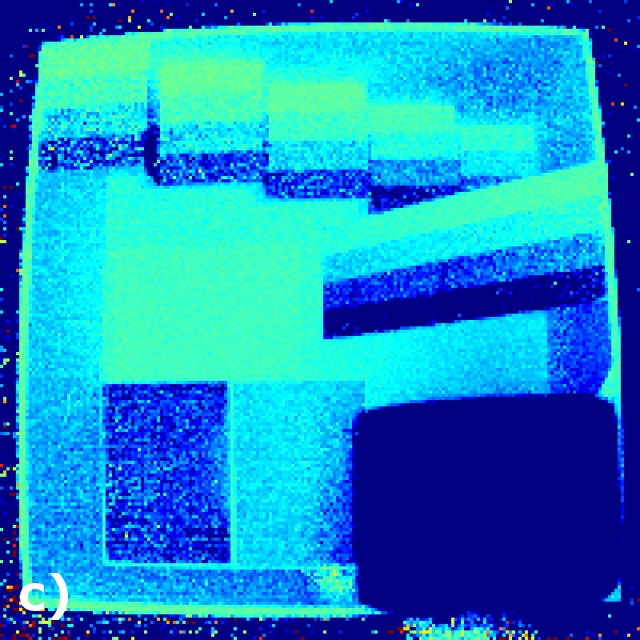
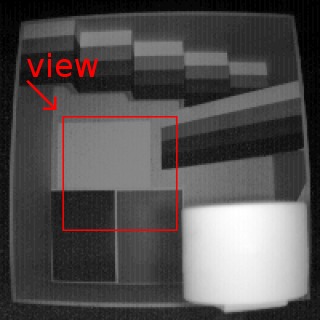
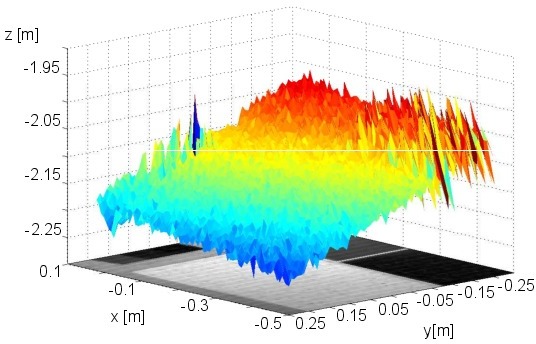
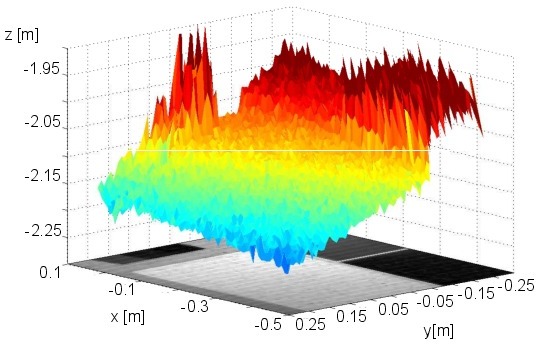
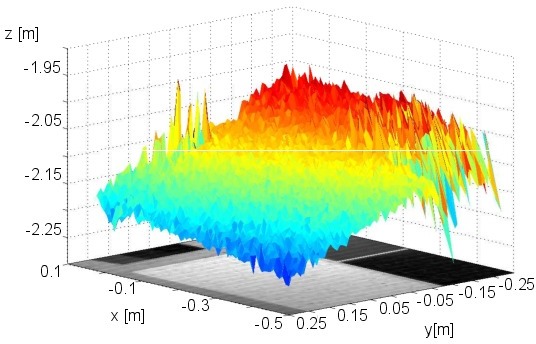
| test scene with bright object in front | depth without bright object in front | depth with bright object in front | difference of measured depth |
| Fig 1.: The scattering effect in ToF depth data. We record a scene without and with a bright object in front. The presence of the bright object significantly changes the depth estimates ( ∝ phase) in dark regions.
| |||
Identification of the scattering effect
We set up a test environment (Fig.1. left), where we recorded the depth of the scene without and with a bright object (white cylinder) in front with a calibrated time-of-flight (ToF) camera [1]. In the measured depth data we observe a significant difference of the depth in dark regions (cf. difference image, Fig. 1 right).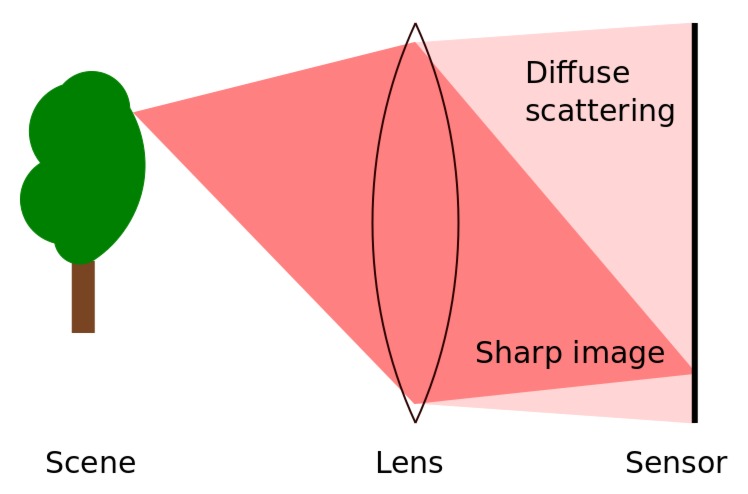
|
| Fig 2. Illustration of the scattering effect. |
|---|
Explanation: The bright object in front reflects the light emitted by the camera LEDs. The amount of reflected light depends on the phase of the emitted signal. The reflected light enters the camera and is scattered by the camera lens. As a consequence, the measured intensity It(x) in each pixel is shifted by an additional amount: It(x) +St(x). The scatting part St(x) is time dependent, otherwise it would cancel out in the phase of incoming signal:
| φ(x) = artan( |
|
) (1) |
From (1) we see that influence of scattering effect on φ is the stronger the smaller It(x) is. Consequently, we observe strong effects in regions with low surface reflectance (dark surfaces in Fig.1, left).
Correction of the scattering effect
In [2] we propose a method to correct the scattering effect. To this end assume that the amount of scattered light is determined by a factor s(x), which only depends on the camera optics but not on the scene recorded:Moreover, we assume that this factor is constant over the image plane: s(x)=s. Thus, scattering correction amounts to determine the scalar value s once in a calibration procedure. For details on the scattering correction we refer to [2].
Our experiments show, that already with the assumption of a constant scattering factor, our method drastically reduces the scattering effect in ToF depth data, see Fig. 3. The corrected depth reaches an accuracy comparable to data recorded in the absence of scattering.
| 
| 
| 
|
| region of interest, scattering object in front | without scattering | with scattering | scatter-corrected data |
| Fig 3.: Correction of the scattering effect (zoom into a specific image region). With the proposed correction method [2] we are able to remove depth errors caused by scattering. After correction we reach an accuracy in the range of depth data without scattering. (The optimal result would be piecewise planar.) | |||
Related publications
| [1] | Damien Lefloch, Rahul Nair, Frank Lenzen, Henrik Schäfer, Lee Streeter, Michael J. Cree, Reinhard Koch, Andreas Kolb, | |
| Technical Foundation and Calibration Methods for Time-of-Flight Cameras, | ||
| In J. Davis, M. Grzegorzek, B. Jähne, R. Koch, A. Kolb, R. Raskar, C. Theobalt (eds.), | ||
| Time-of-Flight Imaging: Algorithms, Sensors and Applications, LNCS 8200, Springer | ||
| doi: 10.1007/978-3-642-44964-2_1 | ||
| [2] | Henrik Schäfer, Frank Lenzen, Christoph S. Garbe, | |
| Model based scattering correction in time-of-flight cameras | ||
| Optics Express, vol. 22 (24), pp. 29835-29846, 2014 | ||
| doi: 10.1364/OE.22.029835 | ||